




地面天气观测——观测什么,如何观测?

地面气象站是如何观测大气状况的?观测了哪些参数?使用了哪些传感器?几十年来,世界气象组织(WMO)已将预报所需的气象要素(气温、湿度、降水、风速风向、太阳辐射、大气能见度等)以及所有观测流程标准化。因此,我们可以在全球范围内交换气象观测数据,以获得对地球大气层的全面监测。同时,将气象卫星、探空气球、飞机、轮船等观测平台上获取的观测数据进行标准化,通过大气诊断以确定大气的初始状态,然后运用强大的计算机算力来预测大气系统的演变。
数值天气预报首先需要确定大气的初始状态,然后用最强大的超级计算机逐步计算后续演变状态。要了解这种初始状态,需要整合来自地面气象站、海上船舶、飞机探空或卫星遥感等大量传感器观测的多源数据(见《天气预报介绍》)。本文将介绍地面观测设备,重点聚焦观测的精确度以及快速采集与集中数据的必要性。
1. 什么是地面观测网?
地面气象观测是最古老和经典的大气分析方法。通过地面气象观测可以获得一些直接的物理量,如气温、气压、风速风向、降水量等。虽然可获得的数据量只是数值预报模式输入数据中很小的一部分(见《气象资料同化》),但是它们被视为地面大气的“真实状况”,即人类及其建筑物最常直接感觉到的物理参数。最初的观测涉及到空气温度,大气压力和降水。尽管几个世纪前发明的传感器现在大部分已被弃用,但有些至今仍在使用,例如水银气压计、水银、酒精温度计以及雨量桶等。
观测网和尺度概念
大气状况是全球各种时空尺度上大气现象混合后的结果,这些现象相互交织,有时需要加以区分。它们的区别如下:
- 天气尺度(大尺度),描述了影响几百公里水平范围,几小时甚至几天的时间段内气团循环的现象。
- 小尺度,涉及数百米的空间范围和几分钟的周期,其中包括湍流现象。
- 中尺度,介于前两者之间,空间范围为几公里或几十公里,时间周期约为几小时。
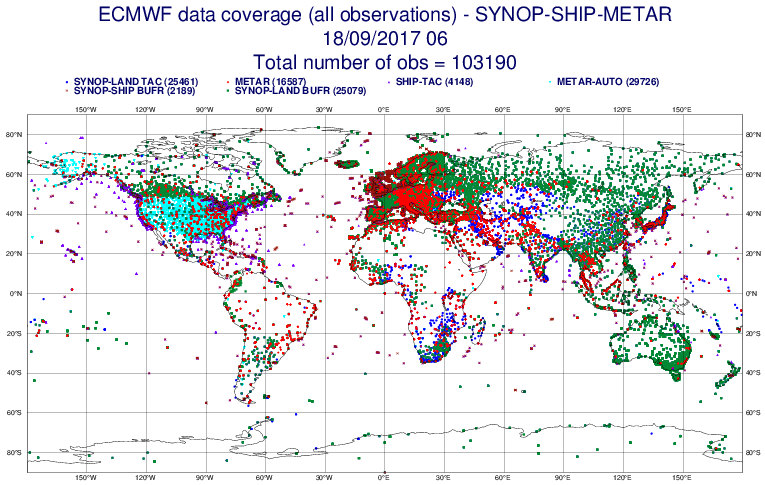
图1翻译:
ECMWF data coverage(all observations)-SYNOP-SHIP-METAR:
欧洲中期天气预报中心(ECMWF)所有数据观测点—地面观测-船舶观测-航空观测
Total number of obs=103190:观测站点总数=103190个
SYNOP-LAND TAC:TAC格式的陆地天气预报观测站点
METAR:航空例行天气报告
SHIP-TAC:TAC格式的船舶观测站点
METAR-AUTO:自动航空例行天气报告
SYNOP-SHIP BUFR:BUFR格式的船舶气象观测点
SYNOP-LAND BUFR:BUFR格式的陆地气象观测点
气象观测数据来自国家和国际观测网络,并在气象部门之间自由交换。图1显示了观测站的全球分布。中尺度观测一般对应于区域和气象部门观测网络,会把当地的地理特征考虑在内。在法国,法国气象局管理着一个称为RADOME的观测网络,该网络约有650个自动站(包括150个天气观测站和500个辅助天气观测站),其任务是记录中尺度的气象观测值。尽管世界上并没有政府观测网络专门用来观测小尺度的天气状况,但是越来越多的个人通过购买商用的迷你气象站用于小尺度天气状况的观测。因此,只要我们对这些新数据进行非常严格的质量控制,我们就可以开始在大城市记录这种微尺度的天气状况。
不同观测网的用途
从一开始,气象观测网就被用来获取即时的天气状况。气象观测所使用的仪器都已标准化,它们具有相同的观测场,其操作是根据世界气象组织(气象组织)仪器和观测方法委员会(CIMO)指南[1]中建议的方法进行的。全球所有台站每小时都会进行一次气象观测(图1)。目前,气象观测系统中的主要气象要素是通过自动气象站进行观测的,例如大气压力、空气温湿度、离地面10米处的风速风向、降水量等。此外,它们还观测光学变量或某些定性的变量,如大气能见度、云底高度和当前的天气状况(指降水性质和大气昏暗程度)。这些参数更难量化,因此传统上由人工进行观测。不过现在,它们的自动化已很普遍。因此,2017年,法国气象局停止了人工观测天气的工作。为了建成“具有历史性意义”的天气观测网络,法国建立了一个由准志愿者管理的密集气候站网络(约3000个站点)。每天观测降水量,有时也会观测极端气温。这些观测仍然由人工进行,计划将在2022年实现自动化。

[图片来源:(勒罗伊 米歇尔-法国气象局)Michel Leroy-Météo-France ]
航空观测站进行特定气象要素的测量和观测,例如机场跑道上的能见度,云底高度和云层范围等。空中交通管制员和飞行员是这些观测值的实时使用用户。实际上,这是气象观测原位使用的唯一情况[2]。为了补充国家观测网络,法国气象局最近推出了一个移动参与式的观测应用程序[3](图2)。每个公民可根据自己的意愿,在智能手机上提供关于其所在地观测到的降水性质的信息,以及与天气状况有关的其他信息。该程序平均每天有30000个观测结果,这些新渠道提供的观测数据受到了气象预报员的高度赞赏(见《预报员的作用》)。
2. 这些观测结果代表了什么?
通常,站点或仪器的环境变化会改变其代表性并使观测结果失真,特别是当一个站点被认为代表一个相对较大的区域时(例如,对于天气观测站来说其观测区域在100至1000平方公里之间)。在《气象仪器和观测方法指南》(世界气象组织第8号文件)中,世界气象组织规定了各种传感器的观测使用规则。但是,当传感器无法满足指南描述的观测条件时该怎么办呢?
有些站点的观测场地已经不能满足规定的气象观测规范。根据法国气象局自1998年以来的观测实践,世界气象组织于2010年对观测站点的观测环境进行了分类[4],以便根据周围环境的影响在小范围内确定观测点的代表性。ISO 19289中也包含了这一分类。其中,一类站点将被视为参考站点,而第五类站点由于观测环境受到附近的障碍物的影响,因而被视为不应进行气象观测的地点。气象观测应该代表一个至少几十平方公里面积的观测结果,因此,不宜在第五类地点进行观测。一般而言,观测场地分类级别越高,面积越大,观测站点就越具有代表性。但对于特定的应用来说,某些在代表性方面存在一些问题的等级较低的站点可能仍值得关注。

[图片来源:©世界气象组织,第8号文件]
这种分类适用于风、空气温湿度、降水量 、太阳辐射等气象要素的观测(如图3所示)。自1998年以来,法国气象局已经开始使用该分类制度,而近年来其他观测网络运营方也开始使用该分类制度。它是与测量地点相关的元数据的一部分,因此在安装观测站时应适当考虑环境限制,目前许多国家正在实施该分类制度。
3. 观测的不确定性
影响气象观测的总体不确定性难以评估,因为观测是在自然环境下进行的,无法像在实验室中对环境条件进行完美的控制。因此,对某一特定量的观测(例如空气温度)可能会受到风、辐射等各种大气要素的干扰。观测不确定性可分为三大主要来源:
- 观测仪器本身存在的不确定性:仪器的特性通常由制造商公布,有时还会指出在实验室中进行了测试的其他影响因素。例如,湿度计由于本身特性,观测精度在-20℃和+40℃之间受温度影响显著。在《CIMO指南》附录1A中给出了用户所需的不确定性和可获得的观测不确定性。
- 观测仪器操作与维护过程中产生的不确定性:观测仪器的传感器需要定期地清洗和校准,从而保持其观测精度。
- 周围的环境和仪器的摆放设置的不确定性:观测场地周边环境的变化会影响观测数据的代表性,因此对观测结果的不确定性也有重要影响。
4. 气温观测
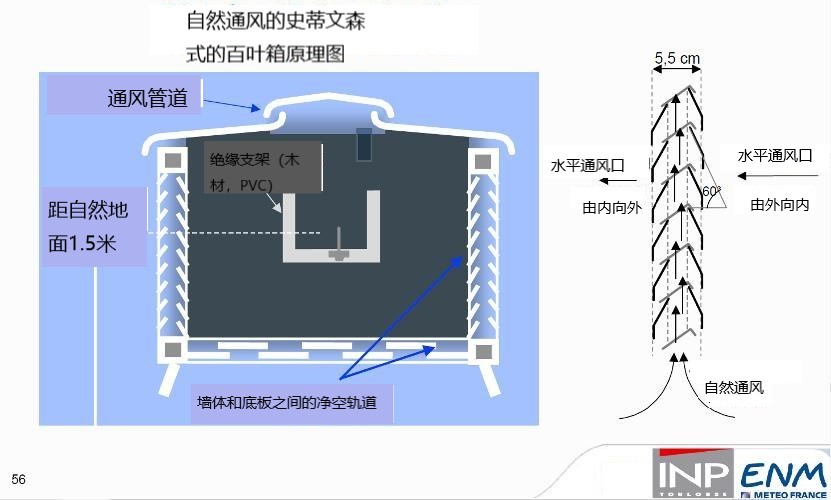
[图片来源:ENM-Météo-France(选自法国国立气象学院的课程)]
在气象学中,所谓的地面气温是指在高出地面1.25米至2米(在法国为1.5米)处观测的空气温度。这个数值通常是在一个气象百叶箱里观测的,这个百叶箱旨在保护温度计免受太阳辐射、地面和天空的热辐射以及降水等因素的干扰。这个百叶箱必须位于能够代表该地区天然土壤的开阔地带。百叶箱的温度应该尽可能接近空气的温度,因此应为白色。它必须既保护传感器免受太阳辐射的影响,又允许空气自由流通,这两个需求有些矛盾。因此,它由防辐射罩或百叶箱组成(图4)。不过,传统的百叶箱并不能完全满足遮蔽太阳辐射和保持空气流通这两个条件,这是导致空气温度观测误差的主要原因。在高太阳辐射和通风不良(< 1m/s)的条件下,误差可能会超过1℃。从理论上讲,强制通风的防辐射罩比自然通风防辐射罩要好。但它需要为电动机提供能源,并确保通风系统有效。它还必须在设计上避免吸入侧的沉积物或积水,这将导致由于湿度效应而降温(有时观察到 -2 ℃的误差)。其成本也更高。出于上述原因,并为了避免测量技术的突变可能导致气候观测序列的不均一性,包括法国在内的大多数国家继续使用自然通风的防辐射罩。
温度测量最常用的电子温度计是铂电阻温度传感器[5],其最常见的标准值为0 ℃(Pt100)100欧姆。因此,这些传感器可在现场互换而无需任何调整。典型Pt100探头在电流观测范围(-40℃至+ 60℃)内的不确定度为0.1℃(DIN IEC 751的1/10)或0.25 ℃(A类标准IEC 751),具体取决于所选传感器的公差。其长期稳定性非常好,每5年校准一次就足够了。
5. 空气湿度观测
为了表征大气的湿度状态,气象学家使用了几个彼此不独立的参数。这些参数的公式特别在《CIMO指南5》第4章的附录4.B中提供。以下是这些参数的列表:
- 混合比r,单位为kg-1:表示水蒸气质量与干燥空气质量之比;
- 蒸汽压e’,单位为百帕斯卡(hPa):表示空气中水蒸气的分压;饱和蒸气压记为e’w,它是随温度上升的递增函数(因为热空气比冷空气包含更多的水蒸气);
- 露点温度Td,单位为度(℃或℉):表示空气中水汽含量不变,保持气压一定的情况下, 使空气冷却达到饱和时的温度;
- 相对湿度U,单位为%:表示蒸汽压e’与饱和蒸汽压e’w之间的比值。
蒸汽压测定
测定大气湿度状态的最古老的方法之一是使用干湿球湿度表(缩写为干湿表)。它是由两个温度计组成的设备:第一个干球温度表测量干燥空气的温度t,第二个是使用浸入水槽中的棉芯测定湿温度表的温度t’。蒸发会冷却湿球温度表,而在空气干燥时蒸发会更强烈,其关系式为e’w-e’=Ap(t-t’)表示,其中p表示大气压力,A表示干湿表系数,其大小具体取决于几何形状,特别是取决于传感器的通风情况,风速应保持在至少2m/s。
由于百叶箱的内部通风不好控制以及受天气条件的影响,过去在百叶箱下使用的自然通风干湿表测量结果精度不高。因此,最好使用强制通风干湿表来控制这种通风条件,例如过去用作参考的阿斯曼干湿表[6]。手摇干湿表也是一个很好的解决方案,它由一个把手和两支温度计组成,操作人员可以围绕这个把手旋转一个装有2个温度计的金属框架。还应该注意的是,干湿计需要正温度才能连续工作。
相对湿度观测

[图片来源:Vaisala 2012]
过去,湿度计或湿度表是根据头发丝的伸长率来测量空气相对于水的湿度,毛发增长量最大时相对湿度便为100%。目前,最常见的湿度计是类似于电容器的小单元,它的容量取决于空气的相对湿度,其电介质是一种对水蒸气敏感的聚合物薄膜(图5)。市场上有许多电容式传感器,但在气象方面,传感器必须能够承受饱和大气中的水蒸气,并且能够在很大的温度变化范围内工作。用最好的模型测量时不确定度接近3%,但在温度变化的条件下使用一定时间后,一般很难保证不确定度小于5%。这些湿度计通常配有Pt100温度传感器,也可以在传感器内部使用以纠正热漂移。上述特性使得它成为一个相当实用的组合传感器。然而Pt100探头十分脆弱,不可能在非恒温槽中校准。因此,法国气象局使用单独的仪器来测量空气的温度和湿度。然而,为了能够计算其他湿度参数(e’、Td等),在同一防辐射罩下测量这两个参数是很重要的。
露点温度观测
一些仪器在同一防辐射罩内同时观测温度和相对湿度,其使用人工加热的空气来限制相对湿度的变化并在最佳条件下使用湿度计以最大程度地减少其不确定性。 然后,结合温度和湿度利用公式计算出露点[7] Td。冷凝湿度计通过珀尔帖(Peltier)效应冷却镜面来直接观测露点[8],然后使用光学检测器识别镜子上的露水外观,其温度由集成温度计观测。这些设备是非常昂贵的,因此尽管有一些适合连续室外运行的型号,但它们一般都用在实验室中作为参考值。此外,电容式湿度计对污染十分敏感,因而通常需要每年进行定期校准,校准成本和传感器成本有相同的数量级!校准一般是在饱和盐溶液中进行的,这使得我们可以得到一个众所周知的固定值。例如,一些常用参考值:LiCl为11%,MgCl2为33%,NaCl为75%。 该校准方法很简单,但需要采取预先处理和标准湿度计来确定实际值。
6. 地面风速观测
风速是一个三维的矢量,但在气象学中,我们主要感兴趣的是它的水平投影。由于风速的强时间变异性导致了我们需要定义一个标准参数来表征风速,即将10分钟内的平均值(用作当地航空用途为2分钟)定义为主导方向的风速,而阵风则定义为在过去10分钟内观测的3秒内的极值。世界气象组织推荐的观测采样频率为4赫兹,至少不应低于1赫兹。

[图片来源:米歇尔·勒罗伊(Michel Leroy)]
不同类型传感器之间的比较(图6)表明,它们所提供的数值差别很小。OMM所要求的不确定度是速度为10%,方向为5°。而对于这种类型的观测来说,重要的是观测的代表性。地面风的观测高度通常为10米,这实际上是一个折衷方案,既能最大限度地减少建筑物或附近植被的影响,又能避免对安装和进出造成过多的限制。观测仪器的安装条件是非常严格的,理想的(1级OMM)安装距离至少是周围障碍物高度的30倍。
螺旋桨式风向风速仪
目前最常见的观测风的仪器是杯形或螺旋风速计。它们配有一个光学传感器,用于计算转数和转数的分数。其响应取决于空杯的形状,因此不一定需要进行初始校准或定期校准。但是为了观测微风,必须保持或定期更换球轴承,以确保足够低的启动阈值(通常在0.5和1m/s之间)。 它们还装有风向标,其风标对准风向。
超声波风速风向仪

[图片来源:朗图焦 皮埃尔-法国气象局( Lantuejoul Pierre-Météo-France)]
现在有多种类型的静态超声波风速计。该仪器一般装有三到四个超声波收发器并且以2对2进行耦合。其观测原理如下:首先在一个方向上观测声音从发射机到接收机的传播时间,然后在相反的方向上通过反转发射机和接收机来观测传播时间,这两个传播时间之间的差异抵消了声音的速度,并给出了发射机/接收机对轴线上的风速,再利用不同发射器/接收器对的组合计算风速和风向,有时甚至可以计算其垂直分量。
这些静态传感器几乎不需要维护和保养。在结冰或冰冻的条件下,它们比螺旋桨式风速计更容易加热。但是有些模型易受到鸟类的干扰:鸟类会啄食发射器或停留在传感器杆之间从而阻挡声波束的传播。有些模型(图7)则没有这种缺点,但也导致了其在结冰条件下更难加热。
7. 降水量观测
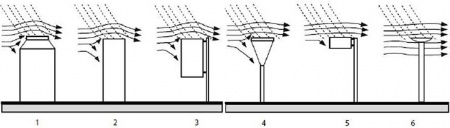
[图片来源:Sevruk, B.and V. Nespor, 1994: The effect of dimensions and shape of precipitation gauges on the windinduced error. In: Global Precipitation and Climate Change(M. Desbois and F. Desalmand, eds.), NATO ASI Series,施普林格Verlag, Berlin, I26: 231-246]
降水主要指以液态或固态形式从天而降的水,也包括以露水、冰等形式沉积的水。观测结果以水的高度表示,单位为毫米 (因为1 平方米表面上1毫米高的水等于1升/平方米)。

[图片来源:国家大气研究中心,http://www.rap.ucar.edu/projects/marshall/events/19mar98/mvc-021f.html ]
观测降水的主要困难是要在定义的表面捕获降水。在没有风的情况下,雨水会垂直下落。但是在有风的情况下,雨量计本身会使气流变形,导致根据雨量计的形状不同而产生垂直的气流,周围风场会由于风速和雨量计的形状(参见图8)而变形,导致降水捕获失败。对于风速为5m /s的雨量计观测时,观测值通常低估约10%,对于10m/s的风速,低估约25%。 虽然证明了双风挡能有效减少观测值的低估(图9),但是其成本和尺寸意味着风挡很少使用。在法国,观测仪器根本不使用风挡。
雨量计
最简单的雨量计是有刻度的集水容器,需要人工读数。对于自动观测而言,最常见的雨量计是翻斗式雨量计。将翻斗放于承水器下,翻斗装满水后会往下倾倒,如此往复进行测量。测量的分辨率由计量漏斗的容量和表面来给出,例如对于20g水桶和1000cm²表面的分辨率为0.2 mm。该技术操作简单,成本低,因此是自动观测中使用最广泛的雨量计。但是为了观测固体降水,加热是必要的,而这会使观测的水量相对减少。另外还有一种称量式的雨量计,也可以用来观测集水桶中盐水的固体降水量。为了避免集水桶溢水,需要一个大容量的集水罐子。该设备比翻斗式雨量计更精确,分辨率也更高。
雪深观测
通常用加热的雨量计测量相当于降雪的水位,进而计算出雪深。但其观测结果在没有风挡的情况下被大大低估。此外,可以通过雪深传感器,无论是超声波(观测声波在雪面上反射的往返时间)或使用激光(通过调制多个频率的激光束的相移观测距离),它们的分辨率/误差都是厘米。
光学传感器

[图片来源:米歇尔·勒罗伊(Michel Leroy)]
此外还有光学雨量计:将一束光发射到探测器,然后用探测器分析与落入光束的粒子通过有关的信号下降来观测降水。一种更复杂的仪器是雨滴谱仪[9](图10),它分析雨滴的大小和速度,从而提供检测到的雨滴数量的分布,将其按大小和下降速度分级。然后计算降水强度。这种传感器也可以用作天气现象观测来识别降水的类型。
8. 辐射和阳光观测
在气象学中,传统的日照观测方法如下:
- 使用总辐射表进行水平面总波长在0.3毫米至3毫米范围内的太阳总辐射的观测,总辐射表是一种由热电堆和附件之间使用黑体感应面而组成的装置。
- 直接太阳辐射是通过日光计观测的,该日光计也使用热电偶,观测方向始终朝着太阳方向。
- 日照时间被定义和观测为直接太阳辐射大于 120 W.m-2的时间。
- 天空的热辐射使用长波辐射表进行观测,该比热计的热电偶受到一个半球罩保护,太阳辐射不能穿过半球罩,但波长>3.5mm的红外辐射则可以穿过。
- 有时还会使用特定的紫外线辐射强度计对太阳紫外线辐射进行某些观测。
9. 能见度观测

[图片来源:米歇尔·勒罗伊(Michel Leroy)]
OMM 将能见度定义为白天在天空背景中能够看到和识别一个适当大小的黑色物体的最大距离。而在夜间观察的情况时,能见度被定义为在普通照明增加到达到正常日光强度时可以看到并识别适当物体的距离。这种能见度也被称为气象光学视程(MOP)。根据Koschmieder定律[10]推导出的POM=3/σ公式,它与常规对比系数为5%时的空气消光系数σ有关。
对于航空用途,要考虑到光源的感知距离,这需要考虑天空的背景亮度:在深色背景上比在浅色背景上更容易看到光源。这就产生了跑道视距(RVR)和航空能见度的运行定义。前者考虑了跑道照明,以提供对飞行员所见的最佳估计值,后者考虑了1000坎德拉光源的存在[11]。这两个参数是POM、背景亮度和光源强度的函数。空气消光系数(POM)主要由散射计观测(图11)。散射计能观测传感器发出的光在传感器前面的小体积空气中散射。它们的范围从几米到超过10公里(达到60公里或更多),不确定度约为观测值的10%到20%。
10. 云层高度和范围

[图片来源:米歇尔·勒罗伊(Michel Leroy)]
一般用图12所示的激光测云仪观测云底到地面高度,该仪器是一种小型激光雷达[12],利用传感器垂直观测大气的后向散射截面:云的存在导致这种后向散射截面突然增加,这是云底存在的良好标志。这仪器一般在机场用于云的观测。虽然它们探测卷云的能力并不强[13],但它们的射程通常达到7000米,完全不会干扰航空所需要的1500至3000米的高度。观测后用算法来结合一个或多个云测距仪的观测结果(一般在计算中使用过去30分钟的观测数据)以确定一个地点上云层的范围和高度,这些算法都假设在传感器上方的云的移动在其估算范围内。
11. 降水性质的观测

[图片来源:法布里斯·桑吉(Fabrice Zanghi)]
过去,降水的类型(毛毛雨、雨、雪、冰雹等)以及更广泛意义上的所谓“当前天气”(即第一节介绍的降水及其类型、雾、薄雾、暴风雨等)是由人工观察并记录下来的。现在为了尽量减少观测成本,人工观测被传感器也就是天气现象观测仪所取代。降水的类型,特别是雨和雪的区别,是天气预报员特别想要知道的。法国气象局使用的传感器(图13)利用散射计进行光学粒子探测(也用于能见度观测),并对电容式传感器上沉积的水量进行估算。这些观测信号的组合使传感器能够对降水类型及其强度进行诊断。但是这种传感器的直接输出结果很少被天气部门使用。为了使诊断更可靠、更精确,需要将其与其他气象参数(空气温度和湿度、地面温度、云层的存在等)的观测结合起来,并采用复杂的算法,这通常是气象部门的专利。
12. 自动观测站和数据采集
通常将各种传感器连接到一个数据采集系统的观测站点称为“自动气象站”。在条件允许的情况下,该站由太阳能电池板供电,但是为了加热某些观测仪器或存在与太阳能电池板不兼容的大功率复杂仪器时就需要连接电源进行供电。自动气象站的数据的采样时间频率通常是一分钟。
随着电信设施的普及和成本的降低,现在的自动气象站可以实时传输观测数据。加上目前GPRS或3G蜂窝网络的广泛使用,最新一代的站点可以每分钟进行一次数据传输。然而对于偏远孤立的站点,则需使用卫星传输数据。由于卫星传输的流量限制和成本限制,传输前必须先进行站点数据处理才能传输一小时内处理过的数据,包括累积值与极端值。
目前法国在全国范围内进行数据采集,然后进行集中处理而不是在当地处理,以便于系统的维护和扩展,控制数据的质量并获得累积和极端情况。最后再将标准信息编码,通过世界气象组织的电信系统广播,供其他国家接收和使用。
13. 要记住的信息
- 确定大气的初始状态需要从地面观测大量的物理量(空气温度和湿度、风速等) 以及更多的表征定性数据,如云团的能见度和大小。
- 地面观测站在不同的尺度上形成了一个密集的观测网络,并且越来越自动化。然而,一些人工观测仍在使用,例如利用智能手机上可用的应用程序来促进实时观测的收集。
- 降低观测的不确定性、台站的维护、台站的自动化和实时数据的集中是气象观测最主要的要求,因为它们决定了天气预报的第一要素,大气的初始状态的质量。大气初始状态是计算大气演变的基础。
参考资料及说明
封面图片:用于观测天气现象(能见度和降水类型)的测试传感器。(©米歇尔·勒罗伊)
[1] WMO-No.8,又称CIMO指南,http://www.wmo.int/pages/prog/www/IMOP/CIMO-Guide.html
[2] 在大多数情况下,局部观测数据与该区域的所有观测数据相结合,以获得某一给定时间的大气状态。管制员和飞行员直接利用机场的观测数据实时地安排和驾驶飞机着陆和起飞。
[3] 任何使用智能手机“法国气象”应用程序的用户都可以参与观察。
[4] 观测场地的分类在上面引用的《CIMO指南》第1章附录1D中进行了描述。
[5] 这些传感器仍然被称为热敏电阻,具有电阻随温度线性变化的特性,至少在一定的变化范围内如此。它们是按照标准电阻-温度关系制造的。
[6] 20世纪前,德国气象学家理查德·阿斯曼(Richard Assmann)用机械弹簧风扇发明了一种强制通风的湿度计。他利用金属管保护干湿温度计以免受辐射。这样的干湿表仍然是现场测量的参考仪器,例如,参见http://www.nandagroup.com/pdfmine/assman.pdf
[7] 露点温度低于空气温度,等于100%相对湿度。相对湿度越低,空气温度与露点温度的温差越大。
[8] 珀尔帖效应是一种热电效应,描述了电流通过两种不同性质的导电材料之间的连接处时产生的热位移现象。
[9] 雨滴谱仪是一种测量液滴大小和液滴速率分布的传感器。
[10] 1924年,科施米德建立了理论用来描述(后来成为科施米德定律)远处的观察者在视界上看到的一个物体的视对比度Cx与它的固有对比度C0之间的关系,也就是说在很短的距离内看到这个的物体与视界的对比度。科施米德的关系可以写成:Cx = C0 e–σx。
[11] 坎德拉是人眼所能感知的光强单位。
[12] 激光遥感或激光雷达,又或者被称为激光探测和测距,是一种远程测量技术,其理论基础是分析反射其发射的激光的性质。
[13] 最高的冰云一般在海拔6到14公里之间。
环境百科全书由环境和能源百科全书协会出版 (www.a3e.fr),该协会与格勒诺布尔阿尔卑斯大学和格勒诺布尔INP有合同关系,并由法国科学院赞助。
引用这篇文章: LEROY Michel (2024年3月4日), 地面天气观测——观测什么,如何观测?, 环境百科全书,咨询于 2026年8月3日 [在线ISSN 2555-0950]网址: https://www.encyclopedie-environnement.org/zh/air-zh/ground-weather-observations-what-is-measured-and-what-is-done-with-it/.
环境百科全书中的文章是根据知识共享BY-NC-SA许可条款提供的,该许可授权复制的条件是:引用来源,不作商业使用,共享相同的初始条件,并且在每次重复使用或分发时复制知识共享BY-NC-SA许可声明。

