


Inversion layer, fog and other curiosities of the lower atmosphere
PDF
How can we explain that in February-March, in the presence of a beautiful anticyclone, it is warmer at altitude than at the bottom of the valleys covered by a real sea of clouds? This situation, contrary to the law of the standard atmosphere according to which the air temperature decreases linearly with altitude, can be attributed to the presence of an inversion layer. But what is it? What mechanisms make it appear, what parameters control it and what are the consequences? We will see that this inversion layer can be located on the ground or at altitude, that it causes the formation of fogs and that it has other less well known effects, such as an increase in the range of the sound or electromagnetic waves that it manages to channel near the ground.
1. What is an inversion layer?
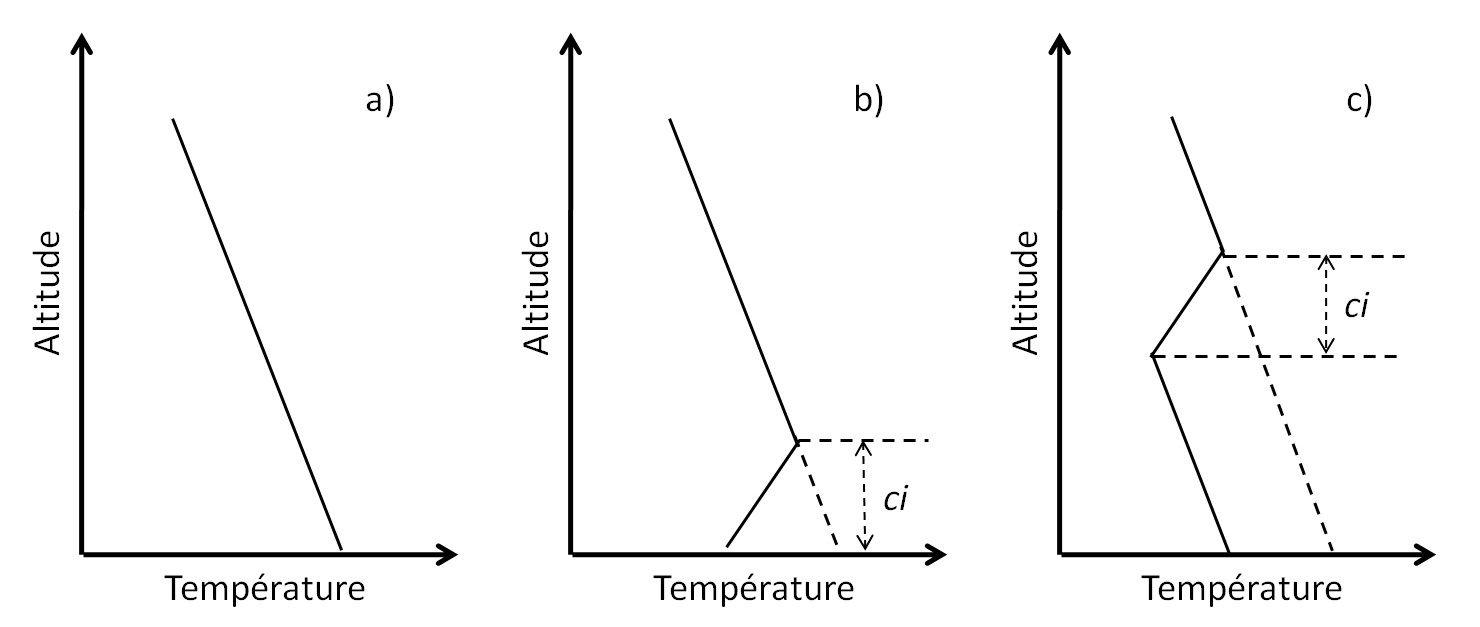
However, exceptions to this 6.5°C/km decrease are quite frequent and lead to the formation of inversion layers where, locally, the temperature can increase as a function of altitude by several degrees (Figure 1). The thickness of these layers is quite variable, from a few tens to several hundred metres, but their horizontal extent is very long, which justifies the use of the word “layer”. Their altitude is also variable, from the ground when they are formed at its contact, to intermediate altitudes between the ground and peaks in mountainous regions. The thickness of these layers and the altitude at which they are formed are highly dependent on the mechanism that leads to their formation.
Within an inversion layer, since the air at the bottom is colder than the air at the top, it is also heavier. As a result, these layers are very stable, i.e. free of convective motion and turbulence. This stability justifies that they are often considered as a kind of cover that prevents any significant upward transport of species or particles accumulated below them, such as pollens, chemical pollutants and air polluting particles.
2. The inversion layer on the soil surface


3. The fogs

This maintenance of equilibrium of an object whose density is 1000 times greater than that of the surrounding air can be explained as follows. Two forces must be compared: the weight of this object, which would be the engine of its fall, and the friction of the air initially located below, which would rise to take the place of this hydrometeor and which would constitute the antagonistic force. The weight is proportional to the cube of the average radius (r3) of the object. The friction is proportional to the outer surface of the object, i.e. the square of the mean radius (r2). When this radius becomes very small, the weight becomes negligible compared to the friction and the hydrometeors cannot fall. On the other hand, for raindrops, snowflakes and hailstones, whose size is larger than the balance between weight and friction, greater than about twenty microns, the balance is broken in favour of weight and these objects fall. The heaviest objects fall more quickly than those whose radius is close to that corresponding to the equilibrium, which gives rise to modest drizzle.
It should be added that when the fog layer is formed, its highest parts are subjected to fairly intense cooling by infrared radiation. Like the radiation from the ground, this contributes to the cooling of the entire layer. And the combination of these phenomena can lead to a strengthening of the temperature inversion, but also to a thickening of the inversion layer.
Pollutants of all kinds, whether they are of industrial origin such as smoke laden with carbon oxides and soot, nitrogen oxides, methane, ozone, or of natural origin such as pollens (Read: Air pollution), gather below this inversion layer or in its lower part (Figure 4). Like the hydrometeors in fogs, they stagnate without convective movement or turbulence. It is they that give these slicks a colour that may appear greyish, bluish or yellowish, depending on the nature of the pollutants. This colour results from the diffusion of light by these objects whose size is much larger than the wavelength, as required by Mie’s Law of Scattering [5] explained in the paper The colours of the sky. One of the best known special cases is the Vosges blue line [6], due to the presence of molecules secreted and expelled by trees, especially conifers, such as isoprene or sabinene.
During the coldest seasons, above a body of water, such as a fairly calm lake or river, a layer of mist is often present, as if it were deposited on the water. Remarkably, it does not disappear as quickly as the layer formed above the surrounding soil or vegetation. This delay in the disappearance of fog from lakes is due to the fact that the water surface reflects the first rays of the sun much better than neighbouring land. As a result, it does not heat up as quickly and can retain a relatively cold fog layer for a longer period of time where evaporation is delayed. In France, this situation is often observed in the Saône valley and on most lakes and ponds during the winter period.
4. The inversion layer of mountain valleys

This anomaly is due to descents of cold and therefore heavy air from the vicinity of the peaks to the valleys. These cold air currents are called katabatic winds. Walkers can feel them quite clearly when they cross a combe where a torrent is flowing; locally they can be caught by this rather localized cold current which, like the water in the torrent, flows down towards the valley bottom. At the highest altitudes the snow cover reflects the sun’s rays very well and keeps the air at ground level at a fairly low temperature, often below 0°C. The katabatic wind is thus maintained at all hours of the day. These conditions are favourable for dew point, condensation of water vapour and the formation of a layer of fog at intermediate altitudes, between 500 and 1500 m. Hikers at higher elevations can then see this sea of cloud from above, from which the summits emerge (Figure 5), which may not disappear for several days. This cloud layer of varying thickness is the inversion layer where the temperature increases instead of decreasing as predicted by the standard atmosphere.
In the summer, well-cleared alpine pastures, forests and rocky slopes absorb the energy of the sun’s rays much better than in winter. In their vicinity and especially on the sunny slopes, from early morning, the air warms up, becomes lighter and forms the upward drafts that paragliders seek and which suck in the air from the vicinity. In the valleys too, the sunshine has warmed the air and allowed a certain agitation of this air. Towards midday, the morning katabatic wind that may be present on the slopes is then replaced by an updraft, called anabatic wind, which is much less localized in the combes than the katabatic wind. Its main effect, combined with the turbulent agitation that reappears with the day, is to renew the air in the valley, cooled during the night, and prevent the formation of an inversion layer.
The slopes of the mountain massifs that surround a valley have different orientations, which implies different schedules for the alternation between the morning katabatic wind and the later anabatic wind. On the other hand, these slopes can be gentler on one side and steeper on the other. When the valley widens, this can give rise to horizontal winds that have neither the same direction nor the same speed, and which can be located in layers one above the other. This can result in some stratification of the air in these valleys (Read: Stratification and Instability in Natural Fluid Environments).
5. Other examples of inversion layers

The tropopause, located above the troposphere at an altitude of about 12 km, is a very special inversion layer, characterized by a halt in temperature decline before further growth in the stratosphere. It is a transition zone between the troposphere, dense enough to be subject to upward heat transport by convective motions, and the stratosphere, where the air is too rarefied to transport heat well by convection. It is described in the article The Earth’s atmosphere and gas envelope. It is the absorption of ultraviolet radiation from the sun that becomes predominant in the stratosphere, where it causes chemical reactions that convert oxygen (O2) into ozone (O3) by releasing heat. As a result, the temperature rises again, from around -56°C in the tropopause to values close to 0°C at altitudes above 50 km.
6. Influence on sound and electromagnetic waves
Like many material media, the atmosphere has the property of allowing these two families of waves to propagate, although they result from profoundly different physical phenomena:
- the compressibility of air for sound waves that propagate with a velocity of about 340 m/s (Read: The Emission, Propagation and Perception of Sound),
- electric and magnetic field oscillations for electromagnetic waves that propagate at the speed of light of about 300,000 km/s (Read: The thermal radiation of the black body).
Nevertheless, both are sensitive to variations in air density and are attracted to the densest, i.e. coldest, regions. In periods of good weather, since the night-time cooling of air layers close to the ground makes them heavier, the paths of these waves are thus slightly curved towards the ground, giving them a significantly greater range in the early morning than in the middle of the day.

In resting air, sound waves propagate in all directions from the transmitter, gradually losing their intensity. This gradual weakening is due to the dissipation of their energy by the viscosity of the air and the distribution of this energy over an increasingly larger space as they propagate. When an inversion layer is present close to the ground, as it rises upwards the sound gradually passes through layers of increasingly hot air, whose density is lower and lower. This causes a refraction that bends the path of these waves to the horizontal. If the inversion is very pronounced, the sound waves initially propagating upwards are returned to horizontal directions, where they converge with those emitted horizontally. This concentration of energy increases the range of these sound waves in the horizontal directions, despite their progressive dissipation by the viscosity of the air. Thus, in the presence of an inversion layer above the ground, the human voice carries farther than in its absence.
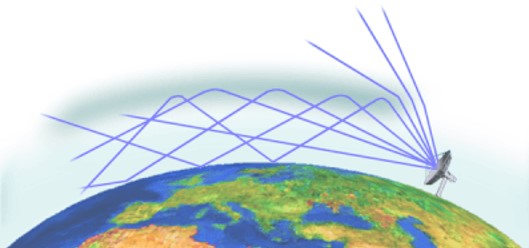
The electromagnetic waves of the radars thus form relatively channelled beams around their main direction and aim to detect distant objects thanks to the echoes they reverberate. This does not prevent them from undergoing refraction in the presence of an inversion layer. The diagram in Figure 7 shows that the inversion layer causes a curvature of the beam, which makes it possible to detect precipitation beyond the horizon. When it is very close to the globe, this beam curvature can lead to a waveguide effect [8]. This effect is particularly noticeable when the inversion layer is located at a fairly high altitude, between 500 m and 1500 m. Then, refracted downwards by the inversion layer and reflected upwards by the ground, the very well guided electromagnetic waves manage to propagate over very large distances (Figure 8).
7. The special case of light

This green ray is the result of the combination of two different physical phenomena, which results in the elimination of other colours, or wavelengths, from the visible band.


8. Messages to remember
- It is the cooling of the ground, either during the night or following a descent of fresh air from the heights by katabatic wind, which imposes a lower temperature than that of the standard atmosphere just above the ground or water bodies. The inversion layer is located below the altitude at which the air temperature returns to its linear decay consistent with the standard atmosphere.
- In winter, this cooling can cause the lower atmosphere to pass the dew point and be subjected to condensation of the water vapour initially present, resulting in the formation of fogs.
- Heavier in the lower part than in the upper part of an inversion layer, the air is very stable and free of convective motion and turbulence. It then behaves like a cover that prevents the renewal of air and the evacuation of pollutants.
- An inversion layer can also appear at an intermediate altitude when a warm front arrives and passes over an already present cold air mass. It is called a frontal inversion layer.
- These inversion layers have the remarkable property of allowing sound and electromagnetic waves to be well channelled, thus increasing their range. The rare and ephemeral green ray and cold mirages are curious illustrations of this.
Thanks to Roland Blanpain, former Head of the Systems Division of CEA-LETI, and Christophe Delaveaud, Head of the Laboratory Antenna Propagation and Inductive Coupling of CEA-LETI-DSYS, as well as to Joël Sommeria, Director of LEGI, and Philippe Bougeault, former Director of CNRM, for proofreading this article and for their comments.
Notes and References
Cover image. Inversion layer and fog in mid-mountain [Source: © DivertiCimes]
[1] This linear decrease is, however, limited to the troposphere, because above 12,000 m in the stratosphere, other mechanisms come into play, such as the absorption of UV energy, which causes a further increase in temperature.
[2] The dew point is the temperature at which the air must be cooled so that the water vapour it contains condenses into dew or frost. At any temperature, there is a maximum amount of water vapour that air can hold, called the water vapour saturation pressure. Any additional water is condensed into droplets where excess water molecules collect.
[3] An aerosol is an assembly of fine solid particles, or liquid droplets, or an assembly of both, suspended in a gaseous medium. Typical examples are droplets suspended in mists or fogs.
[4] Any gas under compression also experiences a temperature rise. This is because pressure and temperature are magnitudes that express on macroscopic scales the consequences of one and the same phenomenon: molecular agitation (Read: Pressure, temperature and heat). A well-known example is the heating of bicycle pumps during compression is a well known example.
[5] Gustav Mie, Beiträge zur Optik trüben Medien, speziell koloidaller Metallösungen, Annalen der Physik, Leipzig, vol. 25, 1908, pp. 377-445
[6] This expression “the blue line of the Vosges” was coined by Jules Ferry, who used it in 1893 in his will. But the physical phenomenon that explains it is not peculiar to the Vosges.
[7] The word radar is an acronym for Radio Detection And Ranging. It refers to systems that use electromagnetic waves to detect the presence and velocity of distant objects that return a signal similar to the echo of sound waves back to the transmitter. The distance is proportional to the duration of the signal’s round trip.
[8] A waveguide is a system designed to channel electromagnetic waves into a particular medium, such as an optical fibre, to avoid their dispersion and thus make their path as long as possible. In general, this process relies on refractive index variations between different media to bring the divergent rays back to the channel.
[9] In contrast, lower mirages, or hot mirages, are those due to the presence of a layer of particularly hot air on the ground, for example in deserts or on very sunny roads, which allows one to see images of objects located above this layer.
[10] John MacDonald, Travels in various part of Europe, Asia and Africa during a serie of thirty years and upward, Forbes, 1790.
The Encyclopedia of the Environment by the Association des Encyclopédies de l'Environnement et de l'Énergie (www.a3e.fr), contractually linked to the University of Grenoble Alpes and Grenoble INP, and sponsored by the French Academy of Sciences.
To cite this article: MOREAU René (January 5, 2025), Inversion layer, fog and other curiosities of the lower atmosphere, Encyclopedia of the Environment, Accessed July 31, 2026 [online ISSN 2555-0950] url : https://www.encyclopedie-environnement.org/en/air-en/inversion-layer-fog-and-other-curiosities-of-the-lower-atmosphere/.
The articles in the Encyclopedia of the Environment are made available under the terms of the Creative Commons BY-NC-SA license, which authorizes reproduction subject to: citing the source, not making commercial use of them, sharing identical initial conditions, reproducing at each reuse or distribution the mention of this Creative Commons BY-NC-SA license.


